Quorum Sensing
In the previous article, we saw that bacteria may encounter several overlapping signals. Different messages can indicate neighbours, competitors, changing conditions or competing courses of action.
View seriesThis is a part one of a four part series of emergent microbial communication.
19-Jul-2026
Read more
In the previous article, we saw that bacteria may encounter several overlapping signals. Different messages can indicate neighbours, competitors, changing conditions or competing courses of action.
View series(See the original demos announcement at the link). We have added more algorithms to the website to try out and tweak.
View seriesOver this 7-part series, we’ve explored how natural systems — ants, bees, birds, and brains — solve problems through emergence, not instruction.
View series
A great article to capture the principles we use at adaptive-emergent. Lessons forgotten in the cloud.
08-Jun-2026
Read more
Ultra-weak ‘biophotons’ might be used to diagnose disease, or could even represent a new signalling mechanism in cells.
02-Aug-2026
Read more
In the previous article, we saw that bacteria may encounter several overlapping signals. Different messages can indicate neighbours, competitors, changing conditions or competing courses of action.
02-Aug-2026
Read more
Long before a distant herd comes into view, an elephant likely already knows it is coming, thanks to silent messages sent through the ground.
01-Aug-2026
Read more
Female Megalopta sweat bees must choose whether to remain as helpers in their mother’s nest or leave to reproduce independently.
31-Jul-2026
Read more
A minimal wake-vortex model explains how a bird following behind and to the side of another can reduce the mechanical power needed for flight by about 11 percent. The leading bird’s oscillating wake reduces the follower’s need to generate thrust, allowing it to flap through a much smaller vertical range. The work converts formation flight from a broad observation into a specific local interaction: position relative to one neighbour changes the energy required by the following agent.
31-Jul-2026
Read more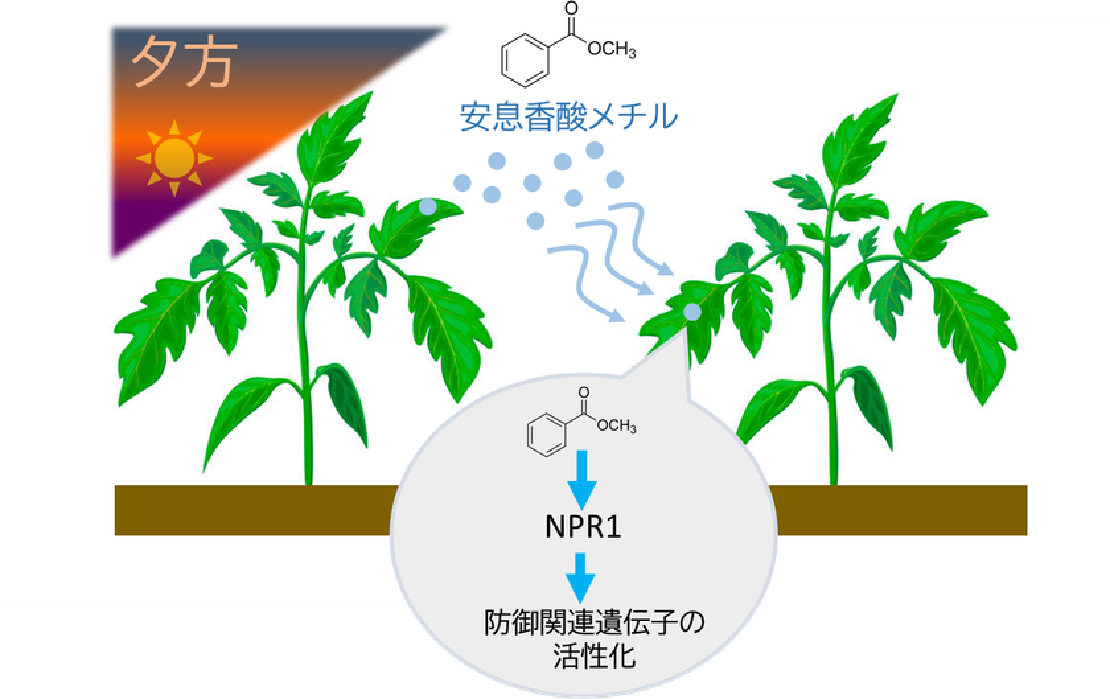
Kagoshima University researchers identified methyl benzoate as an airborne plant-defence signal whose release rises around dusk. Plants receiving the compound activate defence-related genes through NPR1, a central regulator of plant immunity, using a response pattern distinct from the better-known signal methyl salicylate. The finding adds a time-sensitive chemical channel to plant-to-plant communication: neighbouring plants can receive an environmental warning and prepare defensive responses before encountering the threat directly.
31-Jul-2026
Read more
Researchers selectively silenced neural circuits associated with the doublesex gene in older honeybee workers and caused them to resume queen-care duties normally performed by younger bees.
31-Jul-2026
Read more
A new agent-based model suggests that Andean condors can reduce the energetic cost of long-distance flight by using the movements of other birds as continuously updated social information. In patchy, unpredictable landscapes, observing where companions find rising air currents helps individuals choose more efficient soaring and gliding routes. The benefit emerges without central direction: each bird responds to locally available cues, and the group collectively becomes a distributed sensor for changing atmospheric conditions.
31-Jul-2026
Read more
To Which Quorum Should a Bacterium Listen? In the first article on microbial communication, we saw how bacteria release chemical signals that accumulate as a population grows. When a signal crosses a threshold, many cells change behaviour together, without a leader directing them.
30-Jul-2026
Read more
Researchers found that aphids transfer several of their own microRNAs, together with the regulatory protein Argonaute 1, into Buchnera bacteria living inside specialised host cells. The transferred molecules are predicted to target bacterial genes involved in the symbiosis, revealing a previously unknown channel through which an insect may coordinate gene activity with an obligate microbial partner.
27-Jul-2026
Read more