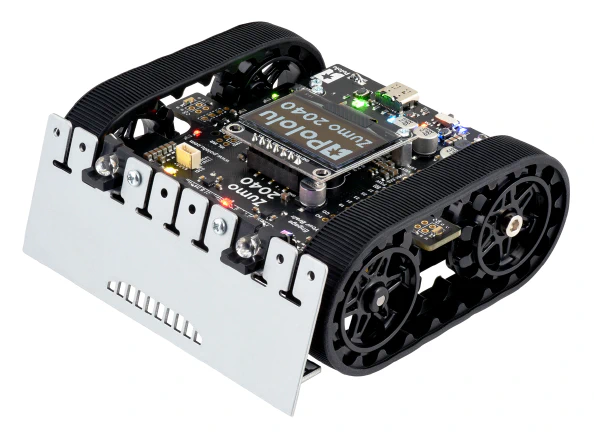
Researchers evaluated ant-inspired robotic coordination strategies for autonomous mining operations, including distributed task allocation and tandem partitioning approaches. The work focuses on improving efficiency and resilience in hazardous industrial environments. Three swarm robotic strategies are explored for mine automation: Baseline (immediate return), Ant (tandem partitioning) and Honeybee (memory-retrieval), implemented on the Pololu Zumo 2040 robot platform.
The robots are available in Australia for $149: https://www.pololu.com/category/308/zumo-2040-robot

