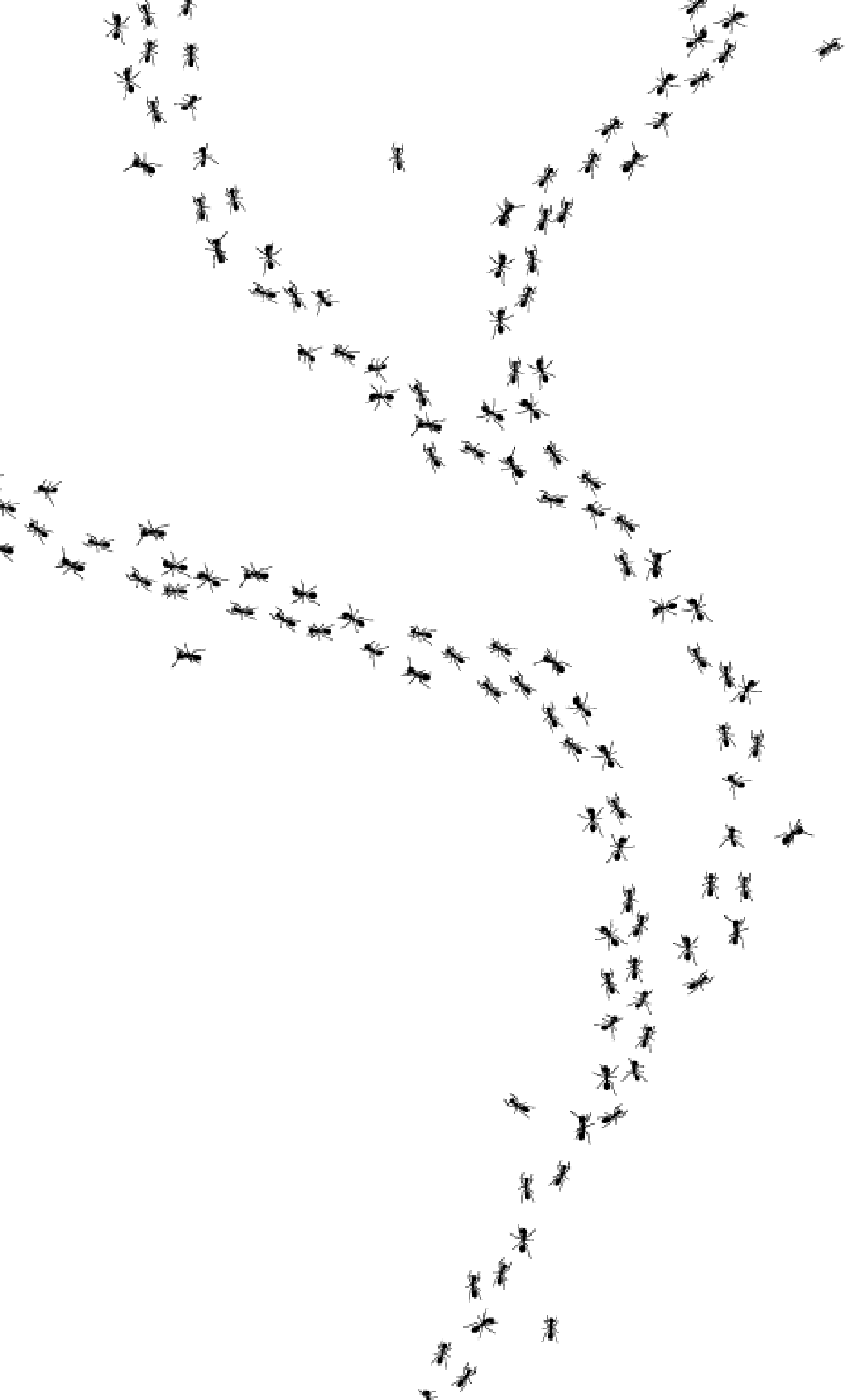
Ancient feeding circuits help ants switch between caregiving and foraging

Long before the dawn of modern parenting, animals laid eggs and moved on, leaving their progeny to fend for themselves. Now, a study published in Nature uncovers one of the elegant ways that evolution transformed neglect into nurture.
Read more